题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
一般工业机器人的工作范围是指机器人()或手腕中心所能到达的点的集合。
A.机械手
B.手臂末端
C.手臂
D.行走部分
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.机械手
B.手臂末端
C.手臂
D.行走部分
答案
 更多“一般工业机器人的工作范围是指机器人()或手腕中心所能到达的点的集合。”相关的问题
更多“一般工业机器人的工作范围是指机器人()或手腕中心所能到达的点的集合。”相关的问题
第3题
A.机械手是一种能模仿人手和手臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
B.机械手不是是最早出现的工业机器人,也不是最早出现的现代机器人。
C.机械手可以代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。
D.机械手广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
第6题
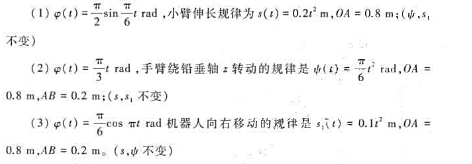
所示。试分别在下列各种条件下求手腕处点B的绝对速度和绝对加速度。